







RealFlight bez kabla z radiem (Jeti)
Opis dotyczy Nadajnika Jeti, ale tak naprawdę , może to być również, każdy inny system!!
Po latach walki ze sobą, kupiłem w tym roku symulator RealFlight Evolution. Mam wersję z ichnim manipulatorem, ale jego jakość jest taka sobie, no i zupełnie nie przypomina mojego DC-24. Na początku chwilę z nim latałem, ale doszedłem do wniosku, że jednak wolałbym wyrabiać odruchy na swoim radiu.
Na pierwszy etap, poszło podłączenie przez USB. Wszystko się w miarę ładnie podpięło, chwila zabawy jest tylko z edycją ustawień sterowania, tak by to wszystko działało jak trzeba.
Ale z czasem apetyt rośnie i zamarzyło mi się latanie bez kabla, tak bym mógł sobie stać w pokoju, przed TV jak na lotnisku, nie martwiąc się, ze mogę zrzucić na ziemię laptopa.
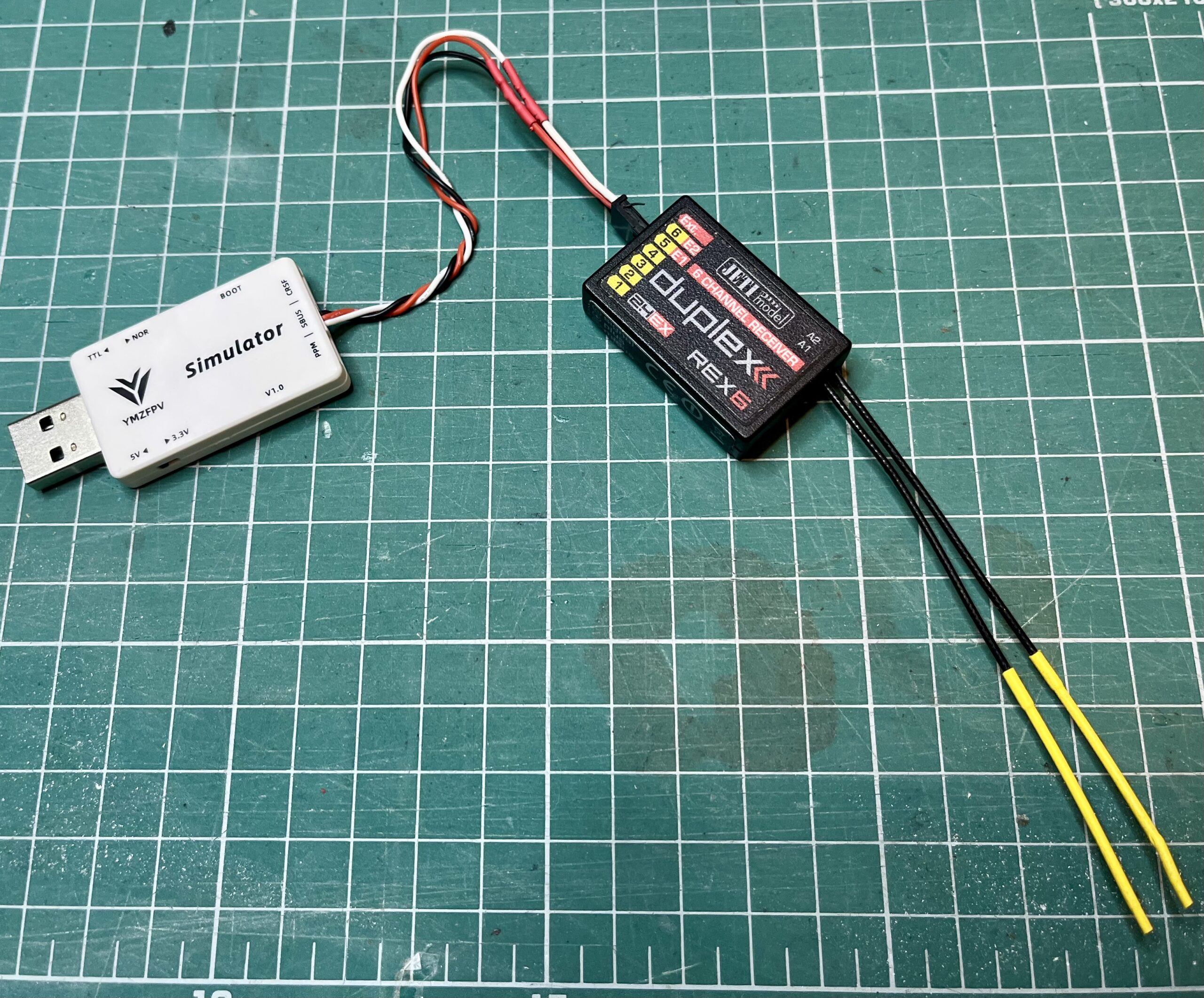
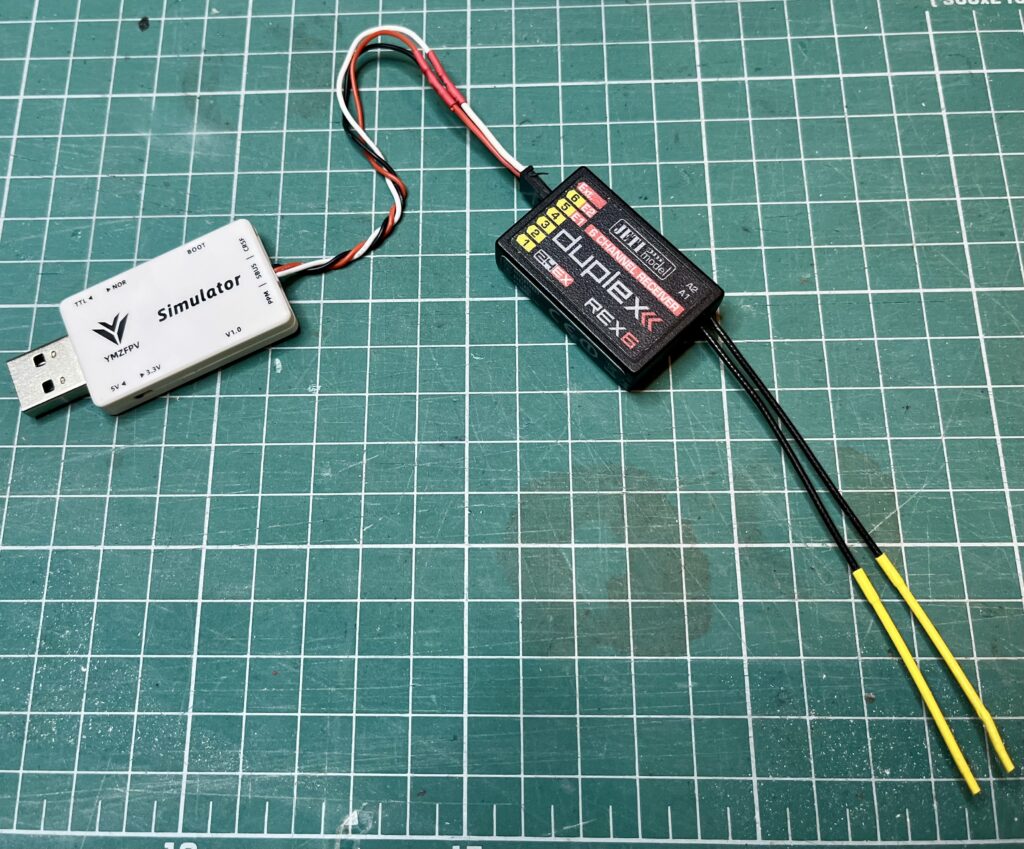
I tak pojawił się moduł YMZPV, kupiony za 64 zł z wysyłka u naszych skośnych braci.
Moduł występuje w dwóch opcjach, USB-C i zwykłe duże USB-A. Moje to to drugie.
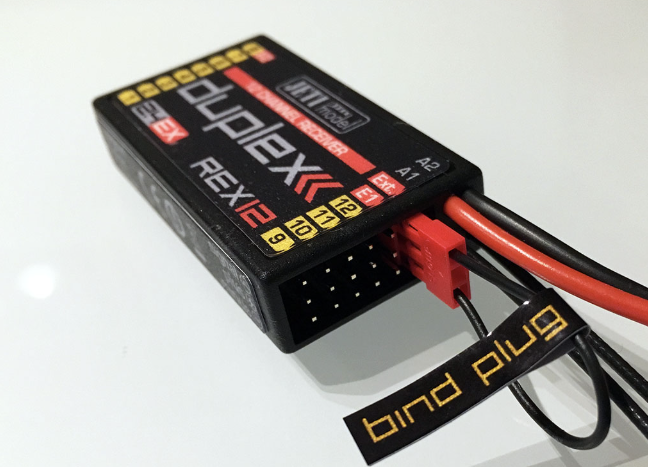
Do działania potrzebuje, stosownego odbiornika, mającego odpowiednią ilośc kanałów. W przypadku Jeti jeden kanał znika do obsługi tegoż modułu. Także mając np. jak u mnie odbiornik 6 kanałowy, mamy do dyspozycji tylko 5 funkcji czyli np. gaz, klapy, lotki, wysokość i kierunek.
Jeśli chcemy zaprogramować więcej funkcji w modelu, musimy podpiąć odbiornik o większej ilości kanałów.
Ale do rzeczy, jak to uruchomić.
Etap 1
Najpierw musimy przygotować sobie stosowny kabelek podłączeniowy. System obsługuje systemy PPM/SBUS/CRSF(eleres). Po zlutowaniu go wpinamy go w odpowiednie gniazdo. Następnie wpinamy całość do gniazda USB i wybieramy przyciskając 5 sek.przycisk BOOT. Każde przyciśnięcie powoduje przeskok na kolejny system. Nie da się naraz przeskoczyć o dwa. Zmiana systemu sygnalizowana jest kolorem diody. Czerwony to PPM, Niebieski to SBUS, Zielony to CRSF.
Etap 2
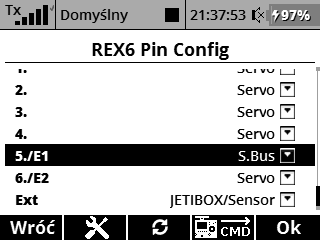
Zakładamy w nadajniku nowy model np. o nazwie Symulator i bindujemy odbiornik. Po zbindowaniu wchodzimy w ustawienia odbiornika i na jakimś kanale włączamy tryb nie SERVO tylko SBUS. Oczywiście przy użyciu innego formatu transmisji ustawiany wybrany.
Etap 3
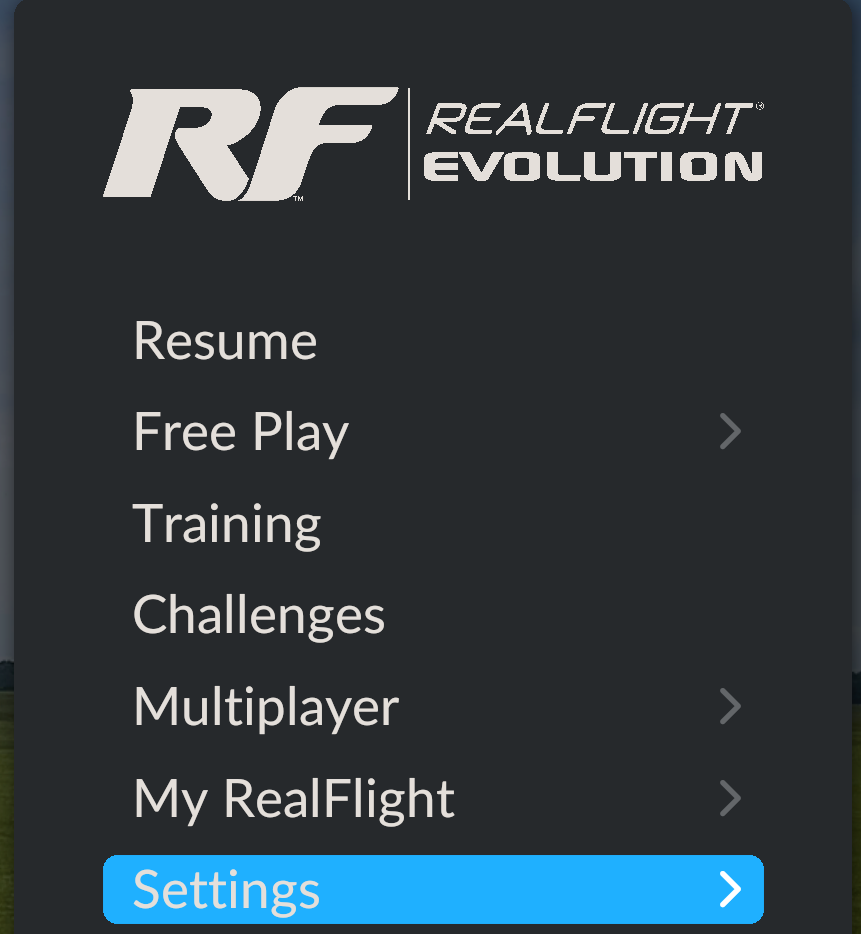

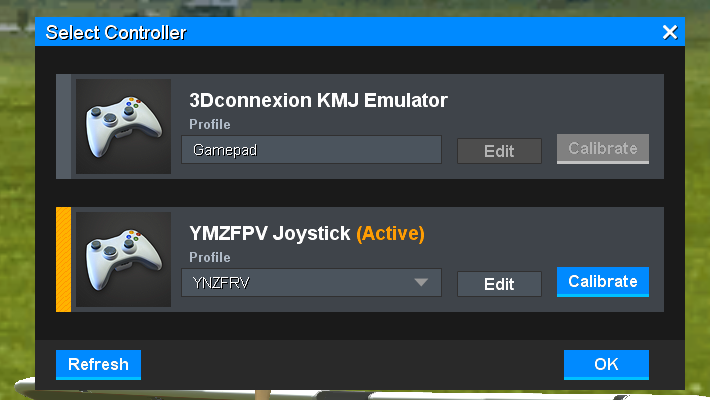
Podpinamy odbiornik do modułu YZMFPV (standardowo zasila on nasz odbiornik napięciem 5V). Włączamy symulator i udajemy się do menu i ustawień kontrolera. Jeśli wszystko jest prawidłowo, na liście powinnna pojawić się nowa pozycja. Jeśli jej nie ma, można zastosować opcję refresh, ale pomaga to tylko gdy wszystko jest dobrze podłączone.
Etap 4
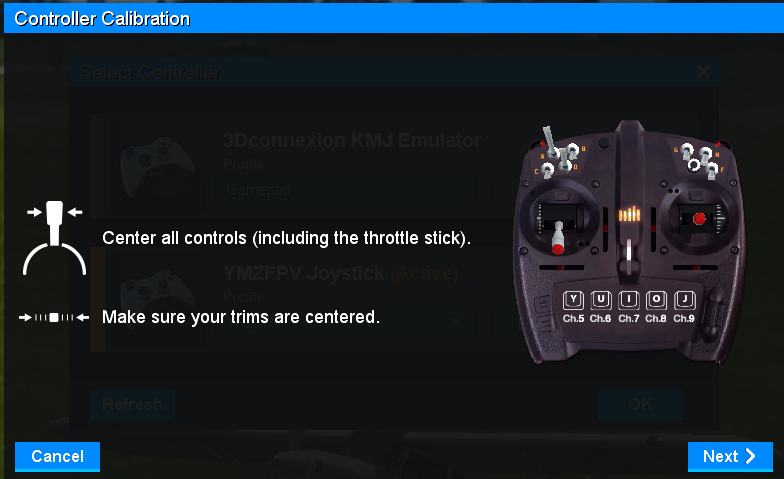
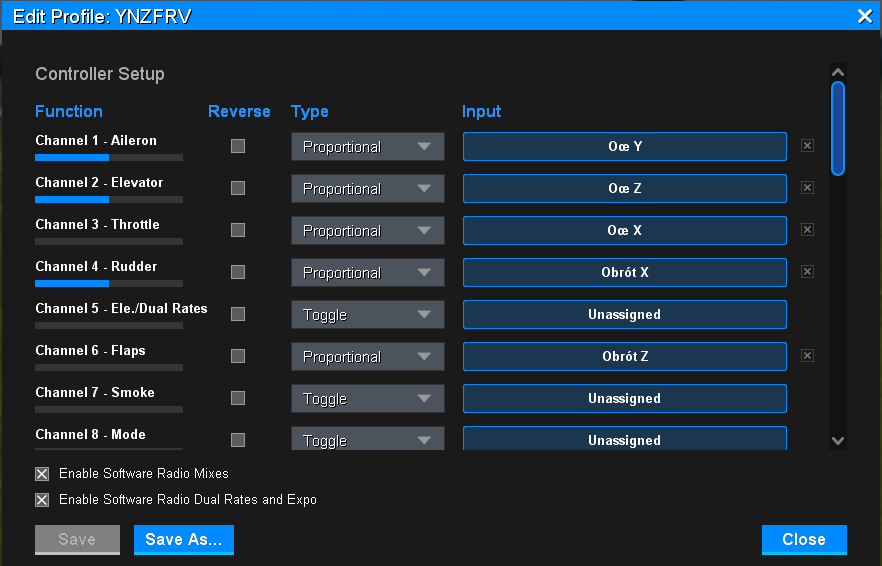
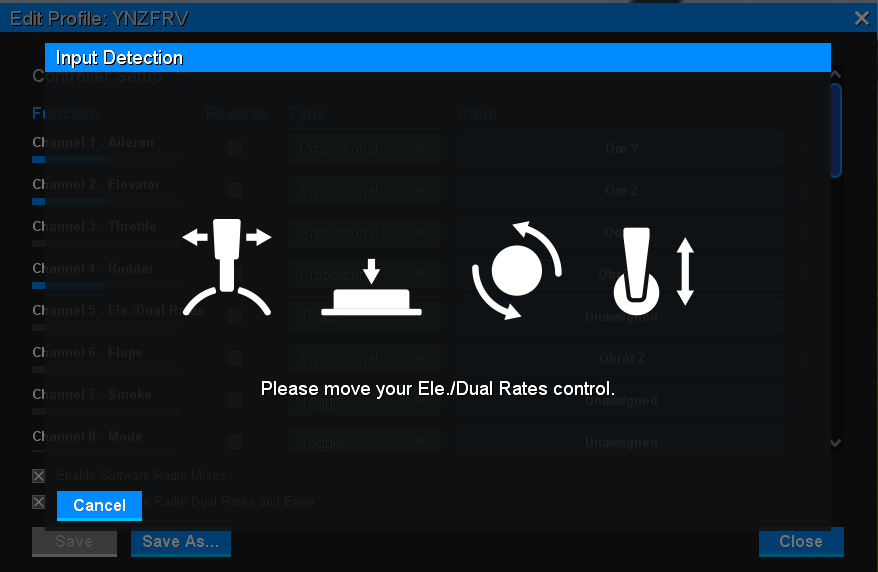
Wchodzimy w kalibrację i wykonujemy zadane polecenia, czyli ustawienie drążków w środku, next i sprawdzenie prawidłowości maksymalnych ruchów. Jeśli wszystko jest klikamy OK, zapisujemy te ustawienia i idziemy do Edit. Tam w bardzo prosty sposób przypisujemy drążki, suwaki i przełączniki do poszczególnych funkcji. Po prawe stronie klikamy niebieski prostokąt, pokazuje się okienko z grafiką, ruszamy , drążkiem, suwakiem lub przełącznikiem i system go wykrywa. Trzeba pamiętać, ze mamy tyle opcji ile kanałów w odbiorniku -1. Po wykonaniu tego, zapisujemy profil, nadając mu własna nazwę i możemy latać do woli. Gdyby stery działały odwrotnie, edycja ma opcję reverse dla poszczególnych funkcji, podobnie jak możliwość wyboru działania np. proporcjonalny, toggle, czy tri-pos.
Doszliśmy do końca, teraz już możemy latać bez kabelka w naszym symulatorze 🙂

Jeśli uważasz, że ten materiał jest fajny. możesz mi postawić kawę, by mnie zmobilizować do tworzenia kolejnych 🙂

Share this content:












Opublikuj komentarz